




Claro, Carlos — vou montar uma descrição técnica completa e clara do conjunto ESP32‑S3 N16R8 + câmera OV5640, do jeito que se usa em documentação de projetos, catálogos ou apresentações.
A ideia aqui é criar um texto profissional, direto e bem organizado.
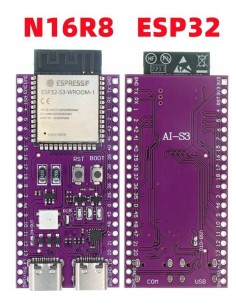
📘 Descrição técnica – ESP32‑S3 N16R8 com câmera OV5640
🧠 ESP32‑S3 N16R8 – Visão geral
O ESP32‑S3 N16R8 é um microcontrolador avançado da Espressif, projetado para aplicações que exigem processamento de IA, visão computacional, Wi‑Fi, Bluetooth e grande capacidade de memória integrada.
Principais características
- CPU: Dual‑core Xtensa LX7 até 240 MHz
- Memória interna:
- 16 MB de Flash
- 8 MB de PSRAM
- Conectividade:
- Wi‑Fi 2.4 GHz (802.11 b/g/n)
- Bluetooth 5.0 LE
- Aceleração de IA:
- Unidade de vetores (SIMD)
- Instruções otimizadas para modelos de visão
- Interfaces úteis para câmera:
- DVP (Digital Video Port)
- I2C para controle do sensor
- DMA de alta velocidade
- Recursos adicionais:
- USB OTG
- Criptografia de hardware
- Baixo consumo de energia
O ESP32‑S3 N16R8 é ideal para aplicações de visão embarcada, como reconhecimento de objetos, leitura de QR codes, inspeção visual e captura de imagens em tempo real.
📷 Câmera OV5640 – Visão geral
A OV5640 é uma câmera CMOS de 5 megapixels, muito usada em sistemas embarcados por oferecer boa qualidade de imagem, foco automático e interface compatível com microcontroladores como o ESP32‑S3.
Principais características
- Resolução: 5 MP (2592 × 1944)
- Interface: DVP (8/10 bits) – compatível com o ESP32‑S3
- Lente: M12 (varia conforme o módulo)
- Foco:
- Versões com foco fixo
- Versões com autofoco (AF)
- Controle: I2C
- Formatos de saída:
- YUV422
- RGB565
- JPEG (compressão interna)
- Recursos adicionais:
- Controle automático de exposição (AEC)
- Balanço de branco automático (AWB)
- Redução de ruído
- Detecção de rosto (hardware)
A OV5640 é uma câmera versátil, com boa qualidade para fotos e vídeos, e excelente custo‑benefício.
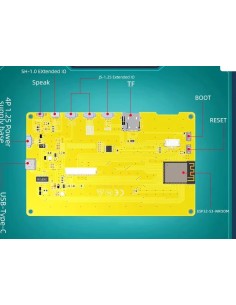
🔗 Integração ESP32‑S3 + OV5640
O ESP32‑S3 N16R8 possui hardware dedicado para lidar com câmeras DVP, o que permite:
- Captura de imagens em alta velocidade
- Processamento local com IA (detecção, classificação, OCR, etc.)
- Transmissão via Wi‑Fi ou USB
- Armazenamento em Flash ou envio para servidor
Conexões típicas
- DVP: pinos de dados D0–D7 + VSYNC + HSYNC + PCLK
- I2C: SDA/SCL para configurar o sensor
- Alimentação: 3.3 V
- Clock: XCLK gerado pelo ESP32‑S3
No reviews
4 outros produtos na mesma categoria:




{kind=link}
{kind=link}
{kind=link}
Tap to zoom
